Плата на NAPI-C своими руками. Часть 2. Софт.
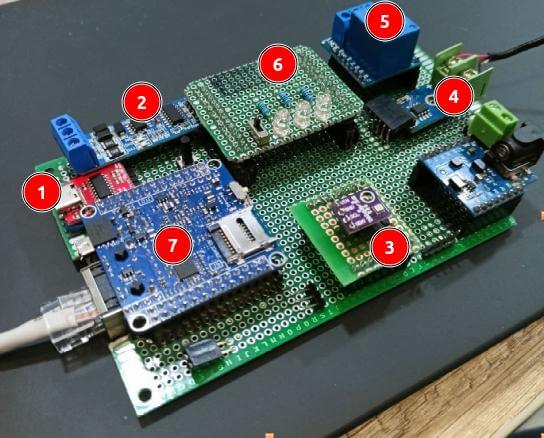
Плата из части 1
В первой части мы сделали плату с UART, I2C, SPI, GPIO
Теперь покажем как с ней работать в Linux
Ставим Linux
Так как Napi это Linux компьютер, на него надо поставить Linux. Мы рекомендуем поставить наш вариант ARMbian, уже подготовленный для работы с NAPI и с предустановленным софтом.
Вы можете поставить чистый ARMbian, но необходимо доставить его "допилить" для использования с NAPI
Скачать и записать на SD образ ARMbian -->
Читаем датчик bmb280
Подключаем оверлей i2c3
В Armbian
- Сделайте файл с приведенным исходным кодом, имя файла
rk3308-i2c3-m0.dts
/dts-v1/;
/plugin/;
/ {
compatible = "rockchip,rk3308";
fragment@0 {
target = <&pwm2>;
__overlay__ {
status = "disabled";
};
};
fragment@1 {
target = <&pwm3>;
__overlay__ {
status = "disabled";
};
};
fragment@2 {
target = <&i2c3>;
__overlay__ {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&i2c3m0_xfer>;
};
};
};
- Выполните команду
armbian-add-overlay rk3308-i2c3-m0.dts
Перезагрузитесь, должно появиться устройство /dev/i2c-3
root@napi-armbian:~# ls /dev/i2c-3
/dev/i2c-3
root@napi-armbian:~#
В NapiLinux
- Откройте файл
/boot/uEnv.txt - Добавьте в раздел
overlays=разделrk3308-i2c3-m0 - Файл должен выглядеть примерно так
verbosity=7
fdtfile=rk3308-rock-pi-s.dtb
console=ttyS0,115200n8
overlays=rk3308-uart3 rk3308-i2c3-m0
kernelimg=Image
extraargs=
- Сохраните файл
- Перезагрузитесь, должно появиться устройство
/dev/i2c-3
Читаем датчик bmp280 (библиотека python)
Самый простой способ (но не единственный), подключить бибилотеку Python и запустить пример.
- Устанавливаем пакет python
python3 -m pip install pimoroni-bme280
Cсылка на репозиторий: https://github.com/pimoroni/bme280-python
- Создаем файл с примером, меняем строчку
bus = SMBus(1)наbus = SMBus(3), так как у нас i2c3.
#!/usr/bin/env python
import time
from smbus2 import SMBus
from bme280 import BME280
print(
"""all-values.py - Read temperature, pressure, and humidity
Press Ctrl+C to exit!
"""
)
# Initialise the BME280
bus = SMBus(3)
bme280 = BME280(i2c_dev=bus)
while True:
temperature = bme280.get_temperature()
pressure = bme280.get_pressure()
humidity = bme280.get_humidity()
print(f"{temperature:05.2f}°C {pressure:05.2f}hPa {humidity:05.2f}%")
time.sleep(1)
В этом листинге номер шины уже поменян.
Назовем файл bmp280.py
- Запускаем скрипт и получаем параметры датчика
root@napi-armbian:~# python3 bmp280.py
all-values.py - Read temperature, pressure, and humidity
Press Ctrl+C to exit!
24.16°C 646.16hPa 96.28%
21.98°C 965.00hPa 24.86%
21.99°C 965.00hPa 24.80%
22.00°C 965.00hPa 24.76%
22.00°C 965.00hPa 24.64%
22.00°C 965.00hPa 24.58%
^CTraceback (most recent call last):
File "/root/bmp280.py", line 26, in <module>
time.sleep(1)
KeyboardInterrupt
root@napi-armbian:~#
Ура ! У нас работает i2c и датчик bmp280.
Видео иллюстрация: https://www.youtube.com/shorts/YHx2SOUr-2k
Читаем датчик термопары max6675
Подключаем overlay для работы с spi2
В Armbian
- Сделайте файл rk3308-spi2-spidev.dts такого �содержания:
/dts-v1/;
/plugin/;
/ {
compatible = "rockchip,rk3308";
fragment@0 {
target = <&spi2>;
__overlay__ {
#address-cells = <1>;
#size-cells = <0>;
status = "okay";
spidev@0 {
compatible = "rohm,dh2228fv";
status = "okay";
reg = <0>;
spi-max-frequency = <10000000>;
};
};
};
fragment@1 {
target = <&uart1>;
__overlay__ {
status = "disabled";
};
};
fragment@2 {
target = <&uart2>;
__overlay__ {
status = "disabled";
};
};
};
- Выполните команду
armbian-add-overlay rk3308-spi2-spidev.dts
Перезагрузитесь, должно появиться устройство /dev/spidev2.0
root@napi-armbian:~# ls /dev/spidev2.0
/dev/spidev2.0
root@napi-armbian:~#
В NapiLinux
- Откройте файл
/boot/uEnv.txt - Добавьте в раздел
overlays=разделrk3308-spi2-spidev - Файл должен выглядеть примерно так
verbosity=7
fdtfile=rk3308-rock-pi-s.dtb
console=ttyS0,115200n8
overlays=rk3308-uart3 rk3308-i2c3-m0 rk3308-spi2-spidev
kernelimg=Image
extraargs=
- Сохраните файл
- Перезагрузитесь, должно появиться устройство
/dev/spidev2.0
Читаем датчик термопары max6675 (библиотека python)
Самый простой способ (но не единственный), подключить библиотеку Python и запустить пример.
-
Для Armbian, устанавливаем пакет
python3-devapt install python3-dev -
Устанавливаем пакет spidev для Python
python3 -m pip install spidev -
Создаем файл из примера
Ссылка на репозиторий с примерами: https://github.com/w4r-10rd/max6675-rpi/tree/main
Сделаем файл такого содержимого, назовем max6675.py
⚠️ Обратите внимание на строчку
spi.open(2, 0), так как у нас SPI2 !
import spidev
import time
spi = spidev.SpiDev()
spi.open(2, 0)
spi.max_speed_hz = 3900000
try:
while 1:
t = spi.readbytes(2)
msb = format(t[0], '#010b')
lsb = format(t[1], '#010b')
r_temp = msb[2:] + lsb[2:]
t_bytes = "0b" + r_temp[0:13]
temp = int(t_bytes, base=2)*0.25
print("Temperature: {:.2f} ºC".format(temp))
time.sleep(2)
except KeyboardInterrupt:
print("Publisher stopped by user.")
- Запускаем скрипт, читаем данные
root@napi-armbian:~# python3 max6675.py
Temperature: 22.75 ºC
Temperature: 22.25 ºC
Temperature: 22.50 ºC
Temperature: 22.50 ºC
^CPublisher stopped by user.
Ура ! У нас работает spi и датчик max6675.
Щелкаем реле !
Реле подключено к GPIO2_B5. Нам необходимо научиться программно менять статус "ножки" для управления реле.
С помощью пакета gpiod
В Linux есть пакет gpiod для работы с GPIO, мы будем применять его. Но (!!!) для корректного чтения GPIO нам понадобиться свежая версия. Для ARMbian мы написали статью, как установить свежую версию из исходников (так как в пакете довольно старая версия).
Для демонстрации работы реле, можно не обновлять gpiod, мы приведем команды для старой версии.
GPIO2_B5 для gpiod это gpiochip2 номер B(8)+5=13
Поэтому чтобы включить реле надо выполнить команду (подходит для всех версий gpiod). Для gpiod2 выйти по Control-C.
root@napi-armbian:~# gpioset -c gpiochip2 13=1
Реле должно радостно щелкнуть и замкнуть контакты !
Чтобы выключить реле, необходимо выполнить команду(подходит для всех версий gpiod). Для gpiod2 выйти по Control-C.
root@napi-armbian:~# gpioset -c gpiochip2 13=0
В версии gpiod 1.6.3 команда
gpiogetсбьрасывает состояние GPIO, именно поэтому мы перешли на версию 2.0+
Для gpiod2 ver 2+ можно выполнить следующие команды:
Убедимся что версия gpiod подходит
root@napi-armbian:~# gpioget -v
gpioget (libgpiod) v2.2-devel
Copyright (C) 2017-2023 Bartosz Golaszewski
License: GPL-2.0-or-later
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law.
root@napi-armbian:~#
root@napi-armbian:~# gpioset -t 0 -c gpiochip2 13=1
И прочитать текущее состояние GPIO
root@napi-armbian:~# gpioget -a -c gpiochip2 13
"13"=active
С помощью подсистемы sysfs
Для этого способа не нужно какого либо софта, но логика работы несколько отличается
- Вычисляем номер ножки.
В системе sysfs это будет GPIO2 (2*32) + B (8) + 5 (5) = 64+8+5=77
- Включаем ножку командой
root@napi-armbian:~# echo 77 > /sys/class/gpio/export
У вас появится каталог /sys/class/gpio/gpio77
root@napi-armbian:~# ls /sys/class/gpio/
export gpio77 gpiochip0 gpiochip128 gpiochip32 gpiochip64 gpiochip96 unexport
root@napi-armbian:~#
- Проверим направление GPIO
root@napi-armbian:~# cat /sys/class/gpio/gpio77/direction
out
- Щелкаем уже реле ! Проверяем статус реле...
root@napi-armbian:~# echo 1 >/sys/class/gpio/gpio77/value
root@napi-armbian:~# cat /sys/class/gpio/gpio77/value
1
- Выключаем реле
root@napi-armbian:~# echo 0 >/sys/class/gpio/gpio77/value
root@napi-armbian:~# cat /sys/class/gpio/gpio77/value
0
- Закончить работу с GPIO нужно командой
root@napi-armbian:~# echo 77 > /sys/class/gpio/unexport
Поздравляем, вы научились работать с GPIO и реле !
Видео-иллюстрация: https://youtube.com/shorts/wvEy2zY3LAA?si=MHbXAGiU6EWYZQv0
Мигаем лампочками
У нас есть плата расширения с 3-мя лампочками (GPIO2_B6, GPIO2_B7, GPIO2_C0) и кнопкой (GPIO2_B3).
Так как мы уже умеем работать с GPIO, приведем примеры работы с лампочками.
Простое включение
root@napi-armbian:~# gpioset -c gpiochip2 14=1
root@napi-armbian:~# gpioset -c gpiochip2 15=1
root@napi-armbian:~# gpioset -c gpiochip2 16=1
Простое выключение
root@napi-armbian:~# gpioset -c gpiochip2 14=0
root@napi-armbian:~# gpioset -c gpiochip2 15=0
root@napi-armbian:~# gpioset -c gpiochip2 16=0
Для gpiod2 включение и чтение статуса
root@napi-armbian:~# gpioset -t 0 -c gpiochip2 14=1
root@napi-armbian:~# gpioset -t 0 -c gpiochip2 15=1
root@napi-armbian:~# gpioset -t 0 -c gpiochip2 16=1
root@napi-armbian:~# gpioget -a -c gpiochip2 14
"14"=active
root@napi-armbian:~# gpioget -a -c gpiochip2 15
"15"=active
root@napi-armbian:~# gpioget -a -c gpiochip2 16
"16"=active
root@napi-armbian:~# gpioset -t 0 -c gpiochip2 14=0
root@napi-armbian:~# gpioset -t 0 -c gpiochip2 15=0
root@napi-armbian:~# gpioset -t 0 -c gpiochip2 16=0
root@napi-armbian:~# gpioget -a -c gpiochip2 14
"14"=inactive
root@napi-armbian:~# gpioget -a -c gpiochip2 15
"15"=inactive
root@napi-armbian:~# gpioget -a -c gpiochip2 16
"16"=inactive
root@napi-armbian:~#
Также мы можем задать не просто включение а период "мигания". Обратите внимание, что процессы gpioset остаются "висеть" в фоне, лампочки будут мигать каждая со своей частотой.
root@napi-armbian:~# gpioset -z -t 500ms -c gpiochip2 14=1
root@napi-armbian:~# gpioset -z -t 200ms -c gpiochip2 15=1
root@napi-armbian:~# gpioset -z -t 100ms -c gpiochip2 16=1
root@napi-armbian:~# ps ax | grep gpioset
2107 ? Ss 0:00 gpioset -z -t 500ms -c gpiochip2 14 1
2109 ? Ss 0:00 gpioset -z -t 200ms -c gpiochip2 15 1
2111 ? Ss 0:00 gpioset -z -t 100ms -c gpiochip2 16 1
2113 pts/0 S+ 0:00 grep gpioset
root@napi-armbian:~#
Чтобы снова работать с GPIO, нужно "убить" процессы
root@napi-armbian:~# kill -9 2107
root@napi-armbian:~# kill -9 2109
root@napi-armbian:~# kill -9 2111
root@napi-armbian:~# ps ax | grep gpioset
2120 pts/0 S+ 0:00 grep gpioset
Поздравляем ! Вы умеете мигать лампочками.
Видео-иллюстрация: https://youtube.com/shorts/vny--tR-lYE?si=qyM4krS9gsSYk4KU
Включим лампочки через sysfs
Инициализация
echo 78 >/sys/class/gpio/export
echo 79 >/sys/class/gpio/export
echo 80 >/sys/class/gpio/export
Подсветим светодиоды
root@napi-armbian:~# echo 1 >/sys/class/gpio/gpio78/value
root@napi-armbian:~# echo 1 >/sys/class/gpio/gpio79/value
root@napi-armbian:~# echo 1 >/sys/class/gpio/gpio80/valu
Погасим светодиоды
root@napi-armbian:~# echo 0 >/sys/class/gpio/gpio78/value
root@napi-armbian:~# echo 0 >/sys/class/gpio/gpio79/value
root@napi-armbian:~# echo 0 >/sys/class/gpio/gpio80/valu
Закончим работать с GPIO через sysfs
echo 78 >/sys/class/gpio/unexport
echo 79 >/sys/class/gpio/unexport
echo 80 >/sys/class/gpio/unexport
Поздравляем, Вы научились работать с светодиодами.
Читаем входящий GPIO
У нас есть фиксирующаяся кнопка (GPIO2_B3), положение которой нужно знать по уровню напряжения на GPIO (так называемый TTL).
Читаем через gpiod 2.0
Итак, тут нам подойдет только gpiod 2.0+. Мы уже умеем читать GPIO2_B3 = gpiochip2 номер 11.
root@napi-armbian:~# gpioget -a -c gpiochip2 11
"11"=inactive
Нажмем кнопку (передвинем рычажок) и прочтем снова
root@napi-armbian:~# gpioget -a -c gpiochip2 11
"11"=active
Итак мы умеем читать состояние кнопочки !
Видео-иллюстрация: https://youtube.com/shorts/sKF9x-KsQnw?si=3xRPU5Ux87_EUSr2
Читаем через sysfs
Инициализируем GPIO2_B3 = 32х2 номер 11 = 75
root@napi-armbian:~# echo 75 >/sys/class/gpio/export
root@napi-armbian:~# cat /sys/class/gpio/gpio75/direction
in
Читаем состояние кнопки
root@napi-armbian:~# cat /sys/class/gpio/gpio75/value
0
Переключаем кнопку и снова читаем состояние
root@napi-armbian:~# cat /sys/class/gpio/gpio75/value
1
Поздравляем, мы умеем читать состояние GPIO через sysfs
Работа с консолью и RS485
Мы не будем подробно описывать работу с консолью (это довольно очевидно).
Напомним только параметры последовательного порта для консоли:
- Armbian: 1500000\8n1
- NapiLinux: 115200\8n1
Flow Control (Аппаратное управление потоком) должно быть отключено.
Как работать с порто�м RS485 и опрашивать датчик по Modbus RTU подробно описано в данной статье.