Статья для тех, кто хочет собрать OpenWrt под платы NapiLab Napi самостоятельно и понимать, что именно происходит на каждом шаге — от патча U-Boot до первого входа по SSH.
Зачем вообще собирать OpenWrt для Napi?
NapiLab Napi — промышленный одноплатный компьютер (SBC) и системный модуль (SOM) на базе Rockchip RK3308. Платформа ориентирована на промышленный IoT: сбор данных с датчиков, шлюзы Modbus TCP/RTU, MQTT-брокеры, удалённый мониторинг.
Ванильный OpenWrt доступен для "родственной" платы RockPi-S, но не знает особенностей Napi: нет device tree дополнительных портов, нет правильной конфигурации U-Boot, нет пакетов для промышленного применения. Наш репозиторий — это набор патчей, DTS, uci-defaults и пакетов, которые превращают чистый снапшот OpenWrt в готовый промышленный одноплатник.
Если хотите сразу попробовать без сборки — готовые образы доступны на странице загрузок napiworld.ru.
Что даёт кастомная сборка
- Стабильный MAC-адрес — генерируется из OTP-данных чипа, не меняется после перезагрузки
- Правильный Device Tree — UART1 и UART2 в нужных режимах, Bluetooth отключён
- Готовый стек Modbus TCP —
mbusd + веб-интерфейс luci-app-mbusd из коробки
- MQTT-брокер —
mosquitto уже установлен и настроен
- Поддержка LTE-модемов — Quectel EP06 работает без дополнительных танцев
- Первый старт без консоли — все настройки применяются через
uci-defaults автоматически
Поддерживаемое железо
Все платы используют один и тот же SoC — Rockchip RK3308, поэтому собирается одна прошивка для всей линейки:
| Плата | Хранилище | Тип |
|---|
| NapiLab Napi-C | 4 ГБ NAND — 32 ГБ eMMC | Промышленный SBC |
| NapiLab Napi-P | 4 ГБ NAND — 32 ГБ eMMC | Промышленный SBC |
| NapiLab Napi-Slot | 4 ГБ NAND — 32 ГБ eMMC | SOM |
| Radxa ROCK Pi S | — | Референсная плата, тот же RK3308 |
Характеристики RK3308
| Компонент | Детали |
|---|
| CPU | Quad-core ARM Cortex-A35, 1.3 ГГц |
| RAM | 256 МБ / 512 МБ DDR3 |
| Ethernet | 100 Мбит/с (GMAC + PHY RTL8201F) |
| USB | 2× USB 2.0 Host |
| UART | 3× UART (ttyS0 — консоль, ttyS1, ttyS2) |
| Wi-Fi | RTL8723DS (802.11b/g/n) |
Структура репозитория: что куда кладётся
./
├── files/
│ └── etc/
│ └── uci-defaults/ # Скрипты первого старта
│ ├── 91-bash
│ ├── 92-timezone
│ ├── 93-console-password
│ ├── 94-macaddr
│ ├── 95-network
│ ├── 96-hostname
│ ├── 97-luci-theme
│ └── 99-dhcp
│
├── package/
│ ├── boot/
│ │ └── uboot-rockchip/
│ │ ├── Makefile
│ │ └── patches/
│ │ └── 108-board-rockchip-add-napilab-napic.patch # Патч U-Boot
│ └── luci-app-mbusd/ # Веб-интерфейс для mbusd
│ ├── Makefile
│ ├── htdocs/luci-static/resources/view/
│ │ └── mbusd.js
│ └── root/
│ ├── etc/uci-defaults/luci-app-mbusd
│ └── usr/share/
│ ├── luci/menu.d/luci-app-mbusd.json
│ └── rpcd/acl.d/luci-app-mbusd.json
│
└── target/linux/rockchip/
├── files/arch/arm64/boot/dts/rockchip/
│ └── rk3308-napi-c.dts # Кастомный Device Tree
└── image/
└── armv8.mk # Описание целевого образа
Разберём каждую часть подробно.
U-Boot: почему нужен патч и что он делает
OpenWrt собирает U-Boot из исходников вместе с прошивкой. Для RK3308 есть готовая конфигурация для Radxa ROCK Pi S — мы взяли её за основу, так как схемотехника близка к Napi.
Патч 0001-napic-rk3308-defconfig.patch
Патч добавляет новый вариант napic-rk3308 в систему сборки U-Boot:
+++ b/configs/napic-rk3308_defconfig
@@ -0,0 +1,42 @@
+CONFIG_ARM=y
+CONFIG_ARCH_ROCKCHIP=y
+CONFIG_SYS_TEXT_BASE=0x00600000
+CONFIG_ROCKCHIP_RK3308=y
+CONFIG_TARGET_EVB_RK3308=y
+CONFIG_DEFAULT_DEVICE_TREE="rk3308-napi-c"
+CONFIG_DISTRO_DEFAULTS=y
+CONFIG_SYS_MALLOC_F_LEN=0x4000
+CONFIG_BAUDRATE=1500000
+CONFIG_BOOTDELAY=0
...
Ключевые настройки:
CONFIG_DEFAULT_DEVICE_TREE="rk3308-napi-c" — указываем U-Boot использовать наш DTSCONFIG_BAUDRATE=1500000 — нестандартная скорость консоли (1.5 Мбод), типичная для RockchipCONFIG_BOOTDELAY=0 — не ждём прерывания при старте (промышленное применение)
Как собрать только U-Boot
make package/boot/uboot-rockchip/compile VARIANT=napic-rk3308 -j$(nproc)
Флаг VARIANT=napic-rk3308 говорит системе сборки использовать именно наш defconfig.
Device Tree (DTS): описываем железо ядру
Device Tree — это описание аппаратной конфигурации платы в текстовом формате. Ядро Linux не знает про периферию «само по себе», ему нужно явно сказать: «вот тут UART, вот тут Ethernet, вот GPIO».
Файл rk3308-napi-c.dts
Берём за основу rk3308-rock-pi-s.dts (Radxa ROCK Pi S — ближайший аналог по схемотехнике) и переопределяем то, что отличается у Napi.
/dts-v1/;
#include "rk3308.dtsi"
#include "rk3308-rock-pi-s.dtsi"
/ {
model = "NapiLab Napi-C";
compatible = "napilab,napi-c", "rockchip,rk3308";
};
/* UART1 → RS-485 через mbusd */
&uart1 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&uart1_xfer>;
};
/* UART2 — доступен как /dev/ttyS2 */
&uart2 {
status = "okay";
};
/* Bluetooth отключаем — не нужен в промышленном применении */
&bluetooth {
status = "disabled";
};
Что важно в этом DTS:
uart1 — маппится на /dev/ttyS1. Это главный последовательный порт, к которому подключаются RS-485 устройства Modbus. mbusd будет слушать именно его.
uart2 — маппится на /dev/ttyS2, доступен для дополнительных устройств.
bluetooth disabled — RTL8723DS предоставляет и Wi-Fi, и Bluetooth через один чип. Bluetooth нам не нужен и только занимает UART, поэтому отключаем на уровне DTS — никаких лишних сервисов, никаких потерь производительности.
Где лежит DTS в дереве OpenWrt
target/linux/rockchip/files/arch/arm64/boot/dts/rockchip/rk3308-napi-c.dts
OpenWrt копирует файлы из target/linux/<arch>/files/ поверх исходников ядра перед компиляцией. Это стандартный механизм добавления новых DTS без форка ядра.
uci-defaults: автоматическая настройка при первом старте
uci-defaults — это скрипты, которые OpenWrt запускает один раз при первой загрузке и затем удаляет. Они позволяют настроить систему до того, как пользователь зашёл в веб-интерфейс или по SSH.
Скрипты лежат в:
target/linux/rockchip/armv8/base-files/etc/uci-defaults/
Нумерация определяет порядок выполнения. Разберём каждый:
91-bash — bash как оболочка по умолчанию
#!/bin/sh
# Меняем /bin/ash на /bin/bash для root
sed -i 's|/bin/ash|/bin/bash|' /etc/passwd
По умолчанию OpenWrt использует ash (BusyBox). Для работы с промышленными скриптами, которые рассчитаны на bash-синтаксис (массивы, [[, $RANDOM, process substitution), нужен настоящий bash. Скрипт делает одно изменение в /etc/passwd.
92-timezone — московское время
#!/bin/sh
uci set system.@system[0].timezone='MSK-3'
uci set system.@system[0].zonename='Europe/Moscow'
uci commit system
Промышленные устройства работают в конкретном часовом поясе. Временна́я метка в логах и данных должна быть правильной сразу, без ручной настройки. MSK-3 — это UTC+3 (Москва).
93-console-password — пароль на серийную консоль
#!/bin/sh
# Включаем запрос пароля на ttyS0
uci set system.@system[0].ttylogin='1'
uci commit system
По умолчанию OpenWrt пускает на консоль без пароля — удобно при разработке, неприемлемо в продакшне. Скрипт включает запрос пароля на ttyS0 (консоль 1.5 Мбод).
94-macaddr — стабильный MAC из OTP
Это самый важный скрипт. Проблема: у RK3308 нет встроенного уникального MAC-адреса в eFuse — он генерируется случайно при каждой загрузке. Это катастрофа для промышленного применения: DHCP-сервер каждый раз выдаёт другой IP, ARP-таблицы засоряются, устройство теряется в сети.
Решение: генерировать MAC детерминированно из OTP (One-Time Programmable) памяти чипа. OTP содержит уникальные данные, которые прошиваются на заводе и никогда не меняются.
#!/bin/sh
# Читаем OTP и берём MD5 от него
MAC=$(cat /sys/bus/nvmem/devices/rockchip-otp0/nvmem | md5sum | \
sed 's/\(..\)\(..\)\(..\)\(..\)\(..\)\(..\).*/02:\1:\2:\3:\4:\5/')
# Применяем MAC к интерфейсу
uci set network.@device[0].macaddr="$MAC"
uci commit network
Разбор команды по частям:
/sys/bus/nvmem/devices/rockchip-otp0/nvmem — бинарный файл с содержимым OTP через интерфейс nvmem ядраmd5sum — хешируем бинарные данные, получаем 32 hex-символаsed — берём первые 12 символов и форматируем как MAC- Первый байт
02 — бит Local (bit 1 = 1) установлен, бит Multicast (bit 0 = 0) сброшен. Это стандарт для locally-administered MAC
Результат: каждая плата Napi получает один и тот же MAC при каждой загрузке, но разные платы имеют разные MAC — уникальность гарантирована уникальностью OTP.
95-network — настройка Ethernet без бриджа
#!/bin/sh
# Убираем дефолтный бридж br-lan
uci set network.lan.device='eth0'
uci set network.lan.type=''
uci delete network.@bridge-vlan[0] 2>/dev/null
uci commit network
Стандартный OpenWrt создаёт бридж br-lan из �всех Ethernet-портов — это логично для роутера с несколькими портами. У Napi один Ethernet-порт, бридж избыточен. Скрипт переводит lan напрямую на eth0, убирая лишний сетевой уровень.
96-hostname — имя устройства
#!/bin/sh
uci set system.@system[0].hostname='napiwrt'
uci commit system
napiwrt — им�я по умолчанию. Устройство будет видно в сети как napiwrt.local (через mDNS). Пользователь может сменить имя через LuCI.
97-luci-theme — тема веб-интерфейса
#!/bin/sh
uci set luci.main.mediaurlbase='/luci-static/openwrt-2020'
uci commit luci
Тема openwrt-2020 — современный Bootstrap-based инте�рфейс. Тема bootstrap (старая) выглядит устаревшей. Устанавливаем сразу нужную.
99-dhcp — конфигурация DHCP
#!/bin/sh
# Убираем dnsmasq с lan-интерфейса — устройство само получает IP по DHCP
uci set dhcp.lan.ignore='1'
uci commit dhcp
Napi в типовой конфигурации — не роутер, а промышленный шлюз. Он не должен раздавать DHCP в сеть, он должен получать IP сам. Скрипт отключает DHCP-сервер на lan.
Пакеты: что и зачем включено в сборку
Промышленный стек
| Пакет | Назначение |
|---|
mbusd | Шлюз Modbus RTU → Modbus TCP. Слушает /dev/ttyS1 (RS-485) и пробрасывает на TCP-порт |
luci-app-mbusd | Веб-интерфейс для mbusd: старт/стоп, конфигурация порта, мониторинг |
mbpoll | CLI-инструмент для опроса Modbus-устройств с командной строки |
mosquitto | MQTT-брокер. Устройства публикуют данные в топики, приложения подписываются |
mosquitto-client | CLI-клиент: mosquitto_pub и mosquitto_sub для отладки |
Поддержка USB-Serial адаптеров
kmod-usb-serial-ch341 # WCH CH340/CH341 (самые распространённые)
kmod-usb-serial-cp210x # Silicon Labs CP2102 и серия
kmod-usb-serial-ftdi # FTDI FT232 и совместимые
kmod-usb-serial-pl2303 # Prolific PL2303
Napi имеет 2× USB 2.0. Через USB-Serial можно подключить дополнительные RS-485/RS-232 адаптеры или устройства с USB-интерфейсом.
Поддержка LTE
kmod-usb-net-qmi-wwan # QMI-протокол для LTE-модемов
uqmi # Пользовательский инструмент для управления QMI
Поддержка Quectel EP06 (Cat-6 LTE). Модем подключается через USB, управляется через QMI. uqmi позволяет настроить APN, поднять PPP-соединение, смотреть сигнал.
Сетевые инструменты
openssh-sftp-server # SFTP — копирование файлов через SSH без FTP
luci-ssl-wolfssl # HTTPS для LuCI (wolfSSL — лёгкая альтернатива OpenSSL)
tcpdump # Захват трафика прямо на устройстве
ethtool # Диагностика Ethernet
Административные утилиты
bash # Полноценная оболочка
htop # Мониторинг процессов
nano # Редактор для тех, кто не любит vi
screen # Мультиплексор терминала — незаменим при работе через последовательный порт
luci-app-mbusd: веб-интерфейс для Modbus-шлюза
Пакет luci-app-mbusd — наша собственная разработка. mbusd — отличный Modbus-шлюз, но управляется только через конфиг-файл и командную строку. Для промышленного применения нужен удобный веб-интерфейс.
Что умеет luci-app-mbusd
- Запуск / остановка / перезапуск службы
mbusd через кнопки в браузере
- Включение / отключение автозапуска при загрузке
- Live-статус процесса с отображением реальных параметров запуска
- Отображение IP-адреса и порта, на котором слушает шлюз
- Полная конфигурация: последовательный порт, скорость, чётность, стоп-биты, параметры Modbus
Интерфейс написан как стандартное LuCI-приложение на Lua + HTML, следует конвенциям OpenWrt UCl API.
Сборка: пошаговая инструкция
1. Зависимости (Ubuntu/Debian)
sudo apt install build-essential clang flex bison g++ gawk gcc-multilib \
gettext git libncurses-dev libssl-dev python3-distutils rsync unzip zlib1g-dev
2. Клонируем OpenWrt
git clone https://github.com/openwrt/openwrt.git
cd openwrt
# Обновляем фиды (репозитории пакетов)
./scripts/feeds update -a
./scripts/feeds install -a
3. Накладываем кастомизации
Архив с кастомизациями берём из релизов репозитория:
# Распаковываем наш архив поверх дерева OpenWrt
tar xzf napic-openwrt-YYYYMMDD-HHMM-v1.0.tar.gz -C /path/to/openwrt/
Архив содержит все файлы из нашего репозитория в том же дереве каталогов, что и OpenWrt. После распаковки:
target/linux/rockchip/ ��— дополнен нашим DTS и uci-defaultspackage/boot/uboot-rockchip/patches/ — содержит патч U-Bootpackage/luci-app-mbusd/ — добавлен наш пакет.config — готовая конфигурация сборки
4. Собираем U-Boot
make package/boot/uboot-rockchip/compile VARIANT=napic-rk3308 -j$(nproc)
U-Boot для Rockchip RK3308 состоит из нескольких стадий:
- TPL (Tertiary Program Loader) — инициализация DDR
- SPL (Secondary Program Loader) — инициализация минимального железа
- U-Boot proper — полноценный загрузчик
Все три стадии собираются автоматически, результат упаковывается в idbloader.img + u-boot.itb.
5. Собираем прошивку
Система сборки OpenWrt:
- Компилирует кросс-тулчейн (gcc, binutils, musl libc)
- Компилирует ядро Linux с нашим DTS
- Компилирует все выбранные пакеты
- Упаковывает rootfs + ядро + U-Boot в финальный образ
Время сборки на современном железе (8 ядер): 30–60 минут при первой сборке, 5–10 минут при пересборке с изменениями.
6. Результат сборки
bin/targets/rockchip/armv8/
└── openwrt-rockchip-armv8-napilab_napic-ext4-sysupgrade.img.gz
Образ содержит таблицу разделов GPT, U-Boot, ядро, rootfs — всё в одном файле.
Прошивка
Если не хотите собирать самостоятельно — готовые образы доступны на странице загрузок napiworld.ru.
# Распаковываем
gunzip openwrt-rockchip-armv8-napilab_napic-ext4-sysupgrade.img.gz
# Пишем на носитель (замените /dev/sdX на реальное устройство!)
dd if=openwrt-rockchip-armv8-napilab_napic-ext4-sysupgrade.img \
of=/dev/sdX \
bs=4M \
status=progress
sync
⚠️ Внимательно проверьте /dev/sdX командой lsblk перед записью. Ошибка в имени устройства приведёт к затиранию данных.
Первый запуск
После записи образа и подачи питания:
- U-Boot стартует, инициализирует DDR, находит ядро в разделе
- Ядро загружается, парсит наш DTS, инициализирует периферию
- OpenWrt init запускает скрипты
uci-defaults (один раз)
- Устройство получает IP по DHCP (MAC стабилен — DHCP-сервер выдаст тот же IP)
- LuCI доступен по
http://<IP>/
Параметры доступа по умолчанию
| Параметр | Значение |
|---|
| IP | DHCP (стабильный MAC гарантирует постоянный lease) |
| Веб-интерфейс | http://<IP>/ → LuCI |
| SSH | root@<IP> (пароль не установлен, задаётся при первом входе) |
| Консоль | ttyS0, 1 500 000 бод |
Типичные вопросы
Почему скорость консоли 1.5 Мбод?
Это стандарт Rockchip для отладочных UART. На такой скорости загрузочные сообщения U-Boot и ядра отображаются без задержек. Требуется адаптер USB-UART с поддержкой нестандартных скоростей (CP2102, FTDI — работают, CH340 — часто нет).
Почему за основу взяли ROCK Pi S, а не официальный RK3308 EVB?
ROCK Pi S — хорошо поддерживаемая в апстриме OpenWrt плата на RK3308. Её конфигурация U-Boot и DTS проверены сообществом, регулярно обновляются. EVB (Evaluation Board от Rockchip) в OpenWrt поддерживается хуже.
Можно ли добавить свои пакеты?
Да. Добавьте пакеты в .config (через make menuconfig или напрямую) и пересоберите. Кастомный пакет можно положить в package/ или добавить внешний фид.
Как обновить прошивку через LuCI?
System → Backup / Flash Firmware → Flash new firmware image. Загрузите sysupgrade.img.gz. OpenWrt сохранит пользовательские настройки (/etc/config/) если не снять галочку «Keep settings».
Скриншоты
 Командная строка через консоль, ssh
Командная строка через консоль, ssh
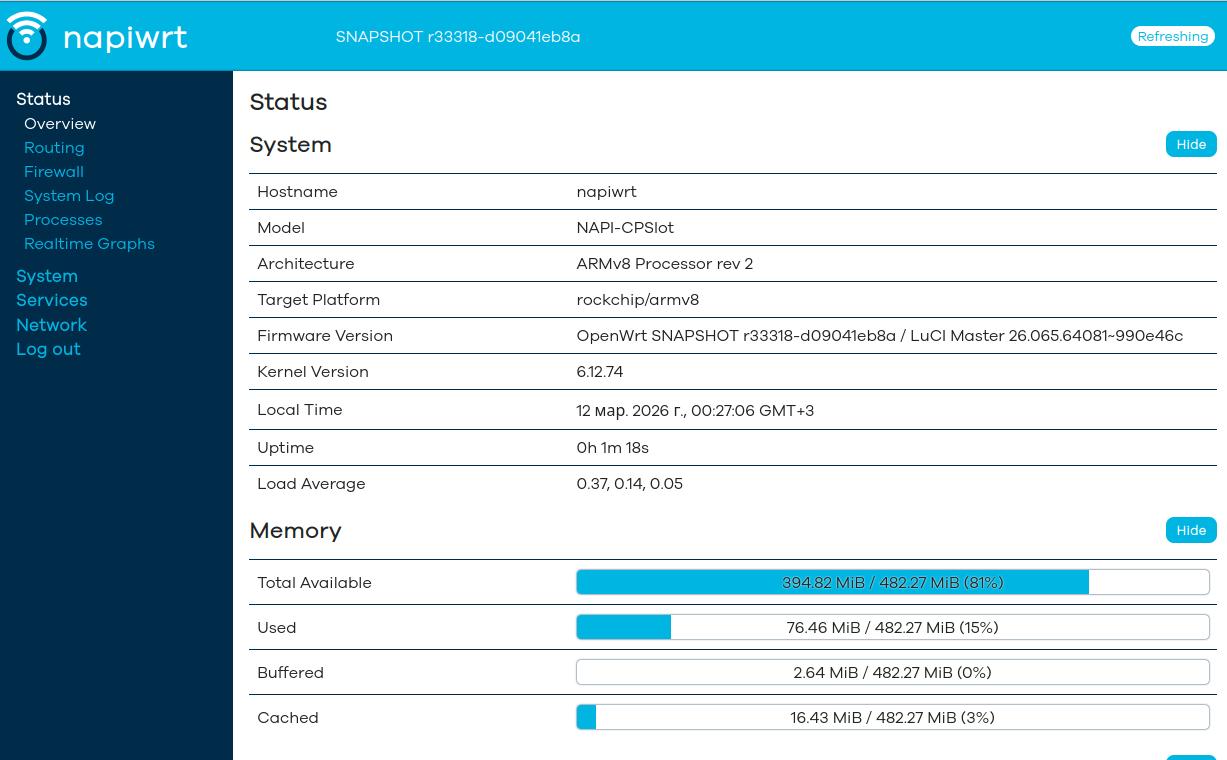 Главная страница
Главная страница
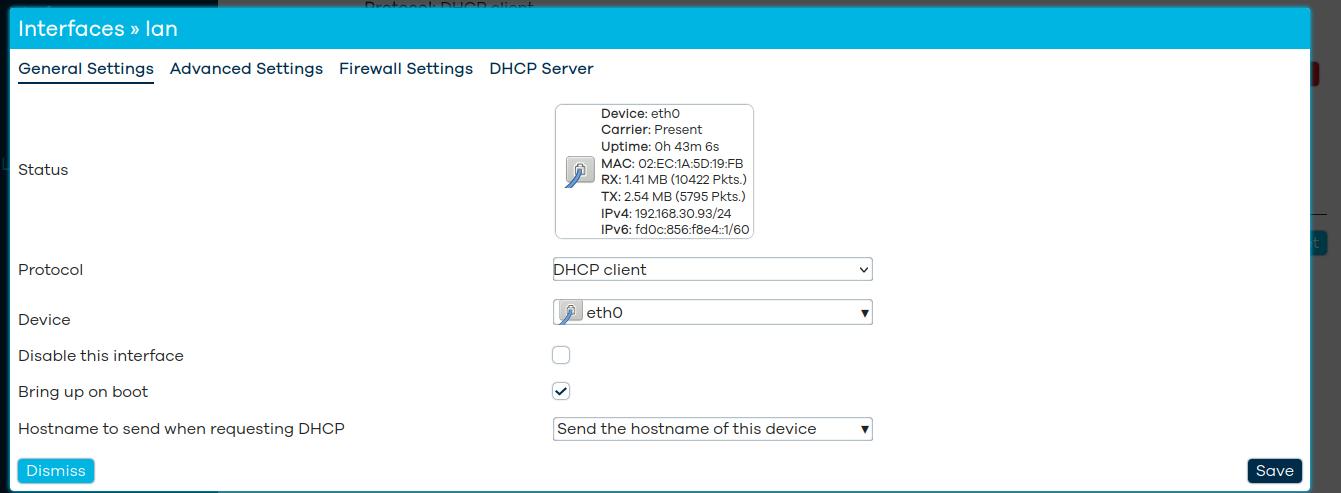 Настройка сети
Настройка сети
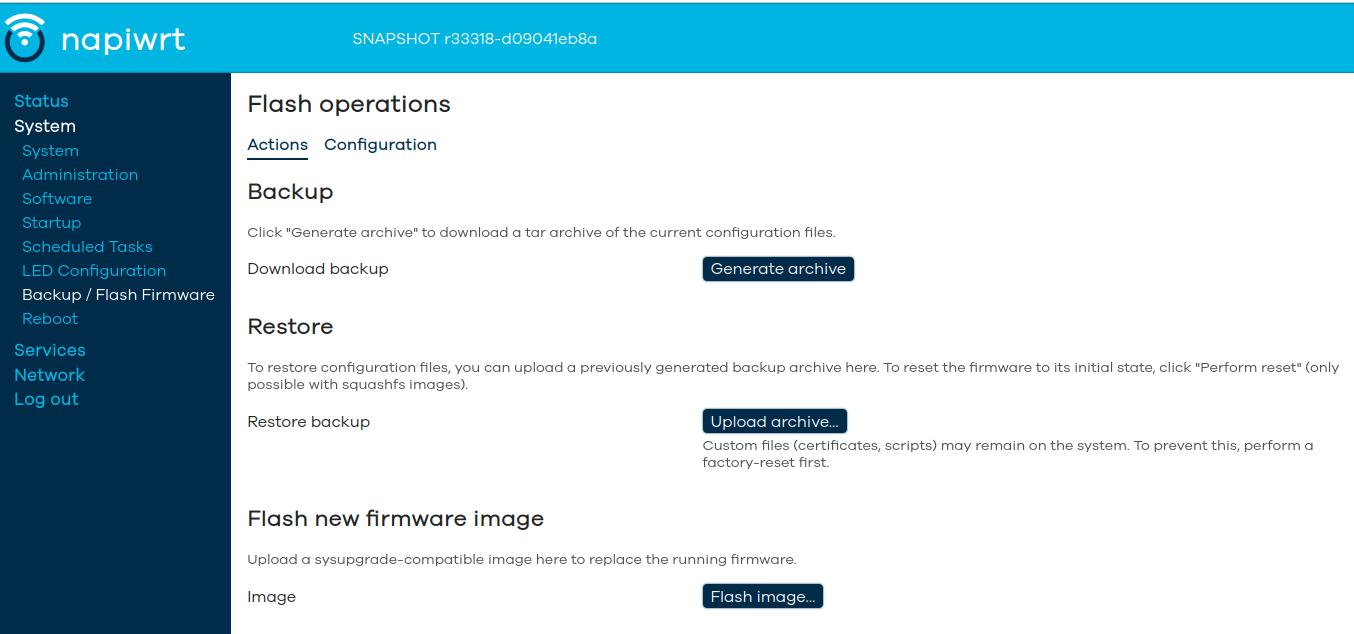 Обновление, бекап, рестор
Обновление, бекап, рестор
 Пакеты
Пакеты
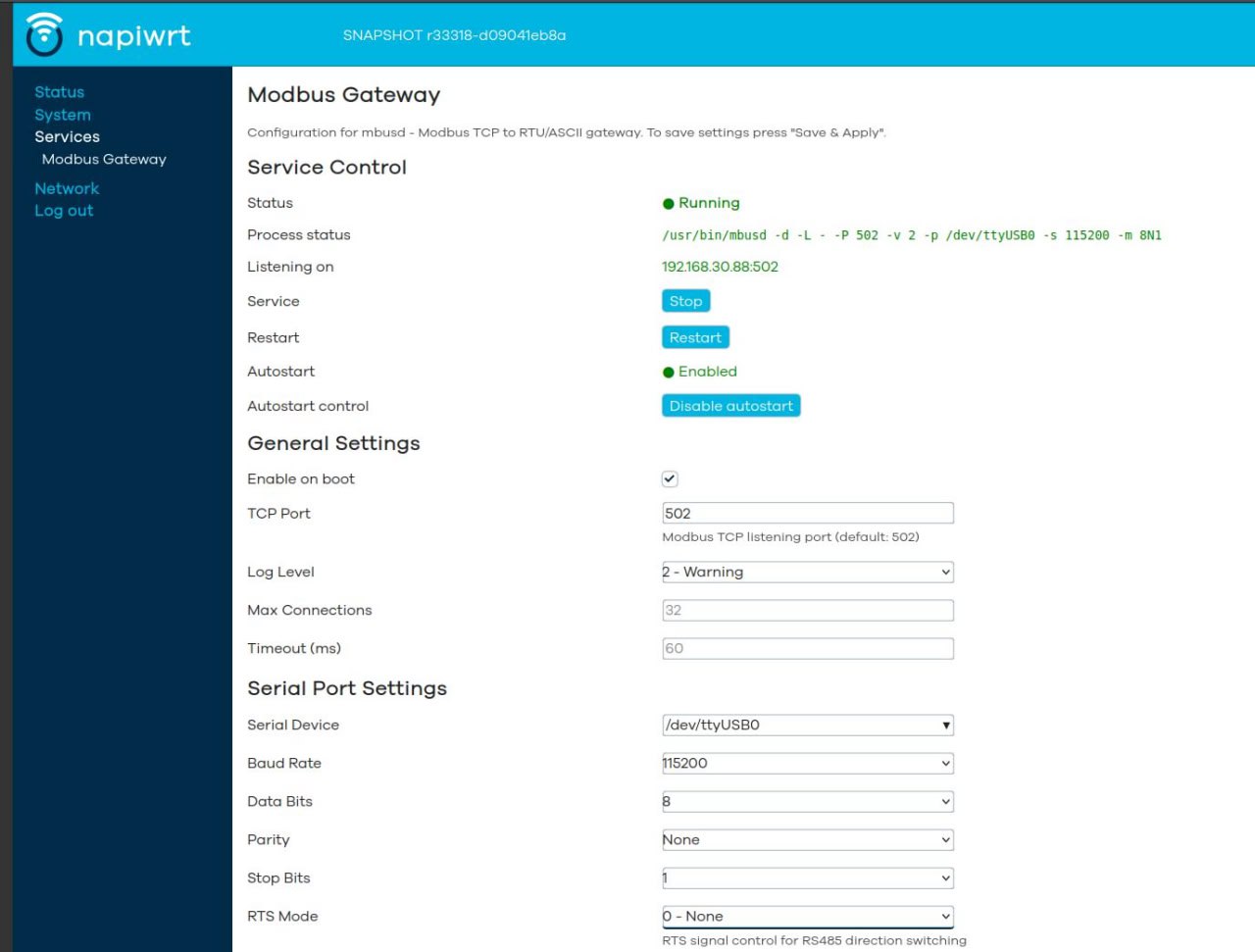 Mbusd
Mbusd
